+86 15633683072
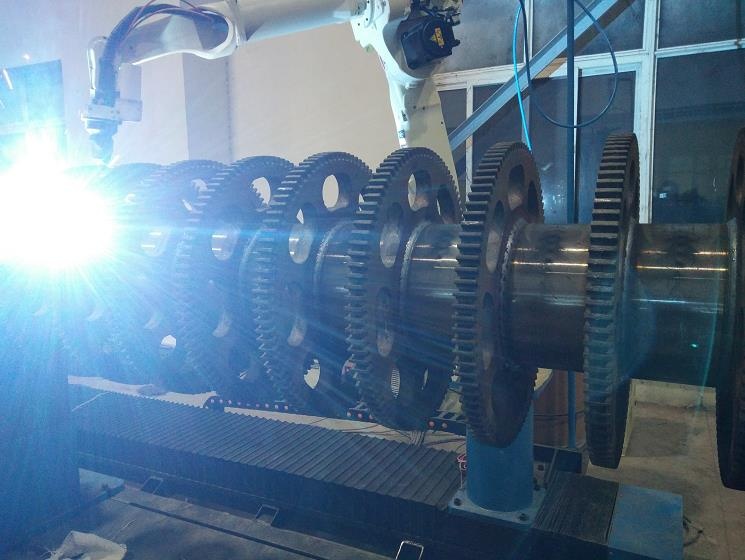
This product adopts advanced vision sensing technology, arc sensing technology, coordinate conversion technology and dynamic compensation technology, which improves the welding precision and quality of the product and has a high degree of processing intelligence.
More advanced servo control system, faster action, more agile reaction, so that the robot in the best way to accelerate the operation, save working time, more powerful, can well meet customer needs.
Simple operation, good man-machine interface, Chinese display, simple worker technical training.It is a small, light, easy to use, and completely independent multi-joint robot, which widens the range of motion of the robot.
good after-sales service, as far as possible standardized and modular product parts, at the same time at any time for network technical guidance and on-site technical services.
1. Autonomous programming technology for fusion of various sensing information
This project adopts force controller, displacement sensor and so on to constitute a high-precision automatic path generation system.In this system, the robot can automatically generate the robot path according to the line drawn by the marker, the displacement controller is used to keep the position of the robot welding torch, and the force sensor is used to keep the distance between the welding torch and the workpiece surface constant.
2. Flexible automatic welding system
The flexible automatic welding system adopts two robots to realize full automation of the welding process.Fully enclosed welding room, to ensure that the welding smoke does not spread out, and prevent the welding arc light damage to the eyes.The fixture of each station can realize quick switching, while the welding program can be quickly switched on the touch screen of the overall control of the whole line, so as to realize quick switching of the production of workpiece of different products.
3. Autonomous programming technology based on dual vision
This project collects and identifies images of welding seams through the visual system, calculates the spatial trajectory and orientation (the pose), and automatically generates the pose parameters of the robot welding gun according to the optimized welding requirements.With on-line measurement mode, the image can be transmitted in real time, so the measurement speed is fast, real-time or quasi-real-time measurement can be realized, and precise positioning can be realized.
4. Weld tracking technology
The welding seam tracking technology of this product requires that the welding robot can detect the deviation of welding seam in real time according to the change of welding conditions, and adjust the welding path and welding parameters to ensure the reliability of welding quality.Good real-time performance, flexible movement of welding torch, in line with the requirements of low cost automation of the welding process, suitable for melting electrode welding occasions.
5.Design coordinate system and welding frame conversion technology
This project obtains accurate welding gun coordinates by converting the coordinates of a feature point of a CAD graph and welding machine coordinates, so as to ensure that the welding gun is in accurate position and correct attitude during the welding process.
6. Dynamic motion trajectory compensation algorithm
This project by using its own dynamic movement path compensation algorithm, can be due to the movement of motor and speed reducer of error compensation and adjustment, by controlling the hardware software adjustment compensation accuracy, reduces the hardware design of high precision motor, speed reducer (abroad) requirements and dependencies, greatly reduces the cost.
| Number | Item | Parameters |
| 1 | Workpiece Dimension | Can be designed according to the size of the user's workpiece |
| 2 | Workpiece Weight | Can be designed according to user requirements |
| 3 | Welding Speed | Generally take 5 ~ 50mm/s, according to the size of the weld to choose |
| 4 | Robot repeats the positioning accuracy | ±0.08mm |
| 5 | The moving mechanism repeats the positioning accuracy | ±0.15mm |
| 6 | Robot Arm Span | 1402mm |
| 7 | Driving Power | 4650w |
Zhengzhou Kehui Technology Co., Ltd
Email: info@zzkehui.com






 Chinese
Chinese English
English OA
OA Current location:
Current location: 
 info@zzkehui.com
info@zzkehui.com Inquiry Online
Inquiry Online


